TF2 Sentry - Page Work in Progress
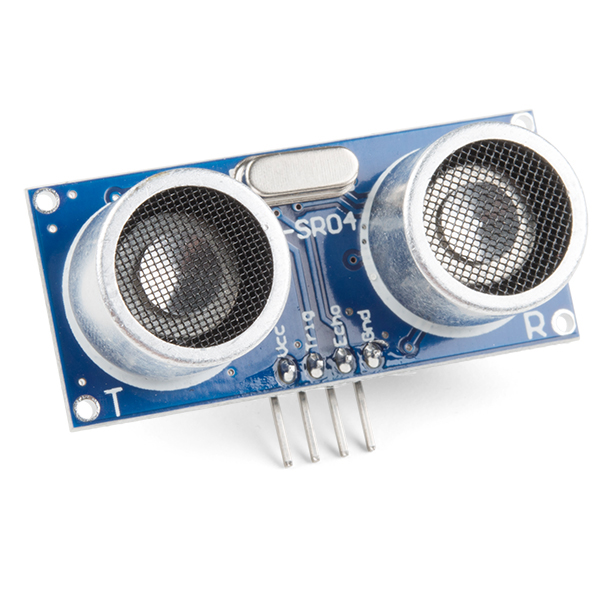
Ultrasonic Sensor System
This system will be used for object detection. It will use a total of 3 ultrasonic sensors. I will use these to see how far an object is from the sentry, and once an object is known to be within a certain distance, I can tell the STM controller to carry out certain routines. The reason I have 3 ultrasonic sensors rather than 1 is to provide a 90 degree view. One will be mounted looking 45 degrees to the left, one 45 degrees to the right, then one centered.
Sensor Selection
Object Detection
Calculations
Programming the STM32F746ZG
The first thing I noticed is there is no supported function for delaying in microseconds. So I will have to write one. This actually isn't too difficult. I can use of the many available timers. I will use timer 3. What I basically need to do is just set the prescalar and keep the counter period to the max. For example, if if the APB is set to 80Mhz, I set the presclar to 80-1 which gives me 1Mhz. Why 1Mhz? Freq = 1/Time. 1Mhz = 1/1uS. The period is left at the max so I can delay up to that amount. For the code, it's straight forward. I'll have the function input an amount to delay by. Then the function will reset the counter to 0, and then have a while loop where while the counter is less than the inputted delay, just stay on the while loop until it reaches that condition.
Now the next part is my sensor routine. It will basically make the TRIG go high, delay by 10 us, then go low.
Now to read the ECHO pin's duration of when it is high, I need to use interrupts and special timers. These timers on this stm32 are TIM1 and TIM8. The reason being is they have something called input capture. It detects a transition by a signal and counts for me so I can have the pulse width of the echo pin, using two channels. There are 6 channels available on TIM1, but channel 5 and 6 do not have this functionality, so I can only count for 2 sensors on TIM1. TIM8 will be used for a 3rd. Channel 1 and 3 will use direct mode and Channel 2 and 4 will use indirect mode, respectively. The reason being is indirect mode means to use the same pin Channel 1 and Channel 3 are connected to, rather then a different pin. Since I only have the echo pin, it is required. I then set channel 1 and 3 as a rising edge, the start of a echo signal and channels 2 and 4 to falling.
Everytime this happens, an interrupt occurs, so I have a callback function ready. In my callback function, I detect if this is the first capture (which is when the echo goes high). If so, just increment the firstCapture variable, so the next time I know the duration has been recorded and can use the value. Now let's say I have the duration. I call a function to calculate the distance using the calculations I discussed in the above section. Then I reset the firstCapture variable. Since I have three sensors and two different timers, my code reflects this. For example I check which timer is calling the callback, and I have different variables for the distance calculated for each sensor!
Finally after all of this, we are returned to the while loop in main. All I have to do now is check if the distance is within a range I set, and carry out the functions I want, those being to play audio, make the motor turn the sentry, make the sentry fire, etc. Also, there comes the question what happens if more than 1 sensor has an object in range? Well I just turn to the closest object, which is how it works in the game.